
دانشجویان یک ربات انساننما با قابلیت **تقلید آنی حرکات ربات انساننما** ساختهاند. این ربات قادر به تقلید آنی حرکات انسان و کنترل از راه دور (teleoperation) است. این ربات نوآورانه از سینماتیک معکوس برای تکرار حرکات انسان استفاده میکند و راه را برای **تقلید آنی حرکات ربات انساننما** و رباتیک پیشرفته هموار میسازد.
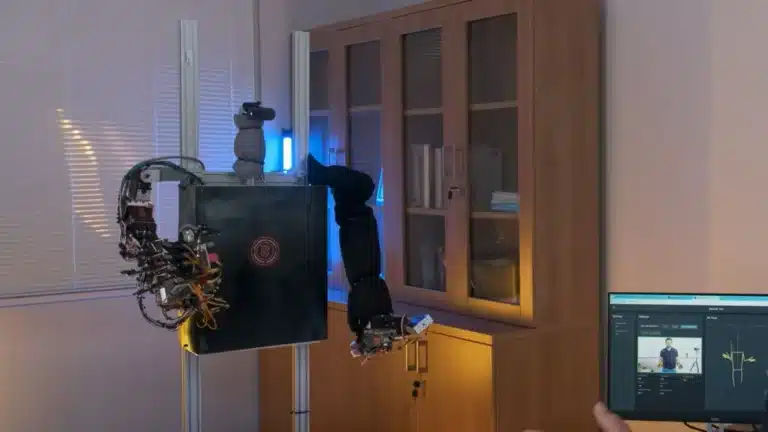
دانشجویان آفریقای جنوبی در دانشگاه استلنبوش یک ربات انساننمای پیشگام ساختهاند که قادر به تقلید حرکات انسان به صورت آنی است. این پلتفرم نوآورانه پیشرفتهای چشمگیری را در رباتیک به نمایش میگذارد و دارای یک قاب تمامقد، یک نیمتنه کاربردی، یک بازوی راست فعال و یک بازوی چپ تقریباً کامل است. این ربات که به وبکم و نرمافزار پیچیدهای مجهز شده است، از سینماتیک معکوس برای ردیابی و تکرار اعمال انسان استفاده میکند و امکان کنترل از راه دور (teleoperation) از هر مکانی را فراهم میآورد. این دستاورد پیامدهای قابل توجهی برای زمینههای مختلف، از جمله تحقیقات، بازرسی از راه دور و وظایف مشارکتی دارد.
توانایی ربات در تقلید حرکات انسان از سیستم سینماتیک معکوس آن ناشی میشود. این سیستم به ربات اجازه میدهد تا حرکات یک اپراتور انسانی را تجزیه و تحلیل کند و آنها را به اعمال متناظر در بدن خود ترجمه کند. این تقلید آنی امکان تعامل پاسخگوتر و سازگارتر با محیط را فراهم میکند و به ربات اجازه میدهد تا وظایف پیچیده را با دقت بیشتری انجام دهد. دکتر ویلیام داکیت، استاد دانشکده مهندسی برق و الکترونیک دانشگاه استلنبوش، پتانسیل عملکرد از راه دور را برجسته کرد و اظهار داشت که از نظر تئوری میتوان ربات را از هر نقطه از جهان کنترل کرد. این قابلیت طیف وسیعی از کاربردها، از انجام تحقیقات در محیطهای خطرناک گرفته تا انجام وظایف پیچیده در مکانهای دور افتاده را امکانپذیر میسازد.
توسعه این ربات انساننما گامی مهم در زمینه رباتیک است. در مقایسه با رباتهای سنتی که اغلب به حرکات از پیش برنامهریزی شده متکی هستند، این پلتفرم جدید رویکردی پویاتر و سازگارتر ارائه میدهد. توانایی ربات در یادگیری و تکرار اعمال انسان به صورت آنی به آن اجازه میدهد تا طیف وسیعتری از وظایف را انجام دهد و با شرایط متغیر سازگار شود. این سازگاری برای کاربردهایی مانند امداد رسانی در بلایای طبیعی، که در آن رباتها ممکن است نیاز به پیمایش در محیطهای غیرقابل پیشبینی و انجام طیف وسیعی از وظایف داشته باشند، بسیار مهم است.
تیم دانشگاه استلنبوش تنها تیمی نیست که مرزهای رباتیک انساننما را جابجا میکند. در فوریه، تیمی از دانشجویان هنگ کنگ کوچکترین ربات انساننمای جهان را با اندازه تنها ۱۴۱ میلیمتر ساختند. اگرچه این دستاورد در مقیاس کوچکتر است، اما علاقه و نوآوری روزافزون در زمینه رباتیک انساننما در سراسر جهان را نشان میدهد. هر دو پروژه پتانسیل رباتهای انساننما را برای انجام وظایفی که برای انسان دشوار یا غیرممکن است، برجسته میکنند.
مرحله بعدی توسعه ربات دانشگاه استلنبوش شامل ایجاد محرک برای پاهای آن است که امکان راه رفتن دوپا را فراهم میکند. این گام مهم، تحرک ربات را به طور قابل توجهی افزایش میدهد و به آن اجازه میدهد در محیطهای پیچیدهتر حرکت کند. این تیم همچنین بر توسعه محرکهای سفارشی، دستهای رباتیک پیشرفته و بازوهای انساننما با چنگالهای انبوه تمرکز دارد. این پیشرفتها مهارت ربات و توانایی آن در تعامل با دنیای اطرافش را بیشتر میکند.
دانشکده مهندسی برق و الکترونیک دانشگاه به طور فعال مشارکت دانشجویان را در این پروژههای نوآورانه تشویق میکند. این دانشکده با ارائه تجربه عملی در طراحی و ساخت رباتهای انساننما، قصد دارد نسل جدیدی از محققان را برای ادامه تحصیلات پیشرفته در این رشته در حال تکامل سریع ترغیب کند. یک دانشجوی کارشناسی ارشد در حال حاضر از پلتفرم Nvidia IsaacSim برای شبیهسازیهای رباتیک مجازی استفاده میکند و بر انتقال از شبیهسازی به واقعیت تمرکز دارد. این تکنیک شامل اعمال نتایج شبیهسازی بر روی نمونه اولیه بازوی ربات فیزیکی است و برنامههای آینده برای گسترش این رویکرد به کل پلتفرم انساننما وجود دارد.
استفاده از پروتکل ارتباطی EtherCAT قابلیتهای ربات را بیشتر میکند. این پروتکل امکان عملیات همزمان و غیرهمزمان را فراهم میکند و ربات را قادر میسازد تا وظایف پیچیده را با کارایی بیشتری انجام دهد. این فناوری که قبلاً در سیستمهای کنترل شتابدهنده ذرات استفاده میشد، نشاندهنده تعهد دانشکده به پیشبرد مرزهای تلاشهای دانشگاهی و مهندسی است.
توسعه این ربات انساننما جهشی قابل توجه در فناوری رباتیک است. توانایی آن در تقلید حرکات انسان به صورت آنی، همراه با پتانسیل آن برای کنترل از راه دور (teleoperation)، امکانات جدید هیجانانگیزی را برای آینده رباتیک فراهم میکند. با ادامه تحقیقات و تکامل فناوری، رباتهای انساننما مانند این ربات آماده هستند تا نقش فزایندهای مهمی در زمینههای مختلف ایفا کنند و نحوه تعامل ما با دنیای اطرافمان را متحول کنند. کار تیم دانشگاه استلنبوش قدرت نوآوری و همکاری را در پیشبرد پیشرفت در این زمینه هیجانانگیز و به سرعت در حال توسعه نشان میدهد. تمرکز آنها بر کاربردهای دنیای واقعی و مشارکت دانشجویان نویدبخش سرعت بخشیدن به توسعه و پذیرش رباتهای انساننما در سالهای آینده است.
اگر به خواندن کامل این مطلب علاقهمندید، روی لینک مقابل کلیک کنید: interesting engineering



















