
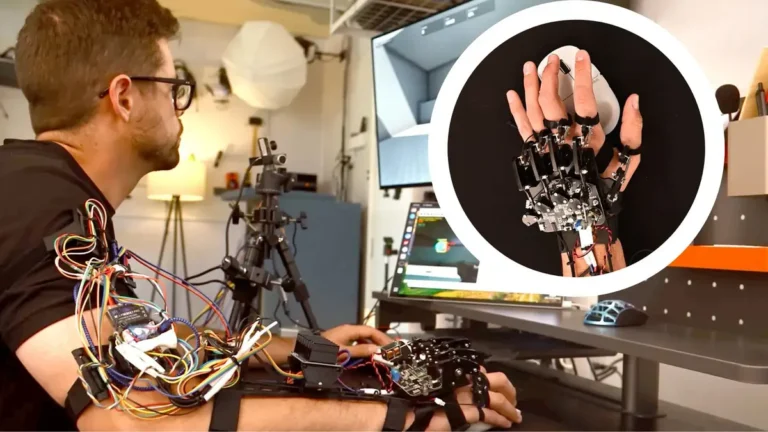
اگه فکر میکنید پروژههای عجیب مهندسی فقط مخصوص شرکتهای بزرگه، سخت در اشتباهید! نیک زتا (همون Basically Homeless خودمون) یکی از اون یوتیوبرهای خلاقیه که هربار یه کاری میکنه همه دهنها باز میمونه! این دفعه، دستگاهی ساخته که اسماً یه اسکلت بیرونی رباتیکه – یعنی یه وسیله که مثل یه چهارچوب دور دست و مچ بسته میشه و با کمک موتور و سیم و چندتا ترفند عجیب، دستت رو هدایت میکنه.
قضیه از اونجا شروع شد که زتا توی بازی Aimlabs (یه برنامه معروف برای تمرین هدفگیری توی شوترها) به امتیاز ۱۳۵ هزار رسیده بود و هر کاری کرد، دیگه بیشتر نشد. با خودش گفت نکنه رباتیک بتونه دستم رو بهتر از خودم حرکت بده؟ خلاصه زد به دل ماجرا.
شروع کارش اونقدرها هم آسان نبود! نسخه اولیه اسکلت رباتیک حتی باعث شد دقتش حدود ۲۰٪ بیفته، چون خیلی سخت بود که بزاری دستگاه دستتو کنترل کنه. اما وقتی عادت کرد و خودش رو ول داد، دید داره بهتر میزنه و ۳٪ از رکورد خودش جلو زده.
بعد رفت سراغ تقویت سیستم. مثلاً یه برد Nvidia Jetson گذاشت روش (این یه کامپیوتر کوچیکیه که مخصوص هوش مصنوعیه و کارای تصویری باهاش راحت انجام میشه)، و یک مدل YOLO هم آموزش داد تا اهداف رو شناسایی کنه (YOLO یعنی یه روش کامپیوتری خیلی سریع که بلده اشیا رو تو تصویر تشخیص بده). با این کار، مدت تاخیر سیستم از ۵۰ میلیثانیه رسید به ۱۷ میلیثانیه – یعنی تقریباً همون لحظه که هدف رو میبینه، واکنش نشون میده.
موتورهای دستگاه هم قویتر کرد که حتی اگه خودش هم مقاومت کنه، باز بتونه مچش رو هدایت کنه. خلاصه اینطوری بود که رکوردها پرید بالا: اول ۱۲٪، بعد ۲۸٪، بعد ۴۳٪ و در نهایت یه پرش ۶۳ درصدی نسبت به بهترین رکورد خودش! اینطوری پرید تو رتبه دوم جدول جهانی Aimlabs.
کلاً تهر سیستم مثل یه «aimbot فیزیکی» کار میکنه! Aimbot یعنی اون ترفندهای تقلبی که توی بازیهای آنلاین یهو میبینی کسی انگار همه تیراش به هدف میخوره و اصلاً اشتباه نمیزنه. برخلاف اونها، این یکی نرمافزاری نیست، واقعاً دست و انگشتات رو تو دنیای واقعی جابجا میکنه.
حالا بخش فنی رو هم خلاصه بگم: این دستگاه با پرینتر سهبعدی ساخته شده و به ساعد میبندنش، بعد یه سری لولا، سیمِ کولار (همون موادی که ضدگلولهس!) و موتور گیمبال (موتورهایی که میتونن زاویه رو خیلی دقیق تغییر بدن)، مچ رو کنترل میکنن. وظیفه کلیکها هم با «سلونوید»هاست که چیزهایی شبیه آهنربا برقیه و کارش فقط فشار دادن سریع انگشته. دوربین فوقسریع اطلاعات رو میفرسته به کامپیوتر، هوش مصنوعی هدفها رو پیدا میکنه و به موتورها دستور حرکت میده – یعنی همهچی آنی انجام میشه.
اما خب، این ایدهها همیشه یه بحث بزرگ راه میندازن: آیا تغییر دادن جسم بازیکن با ربات هم جزو تقلب حساب میشه یا نه؟ خیلیها طرفدار اینن که مسابقهها تا جای ممکن عادلانه بمونه. تا الان، چیترها با نرمافزارها رو راحتتر تشخیص میدادن، ولی اینجور تقلب فیزیکی دیگه واقعاً تشخیصش سخته.
خود زتا البته کل پروژه رو با شوخی گرفته بود و گفت: «این اسکلت رو ساختم واسه مقابله با چیترها!» ولی پشت این شوخی واقعاً مهندسی جدی خوابیده بود. حتی تو ویدیو یه خورده هم اشاره کرد که اگه این سیستم رو با تکنولوژیهای عصب و عضله ترکیب کنن، شاید نتیجههای خیلی بزرگتری هم بگیریم – یعنی شاید روزی برسه که ربات با بدن ما خیلی یکپارچهتر کار کنه و فقط هدفگیری رو بهتر نکنه، خیلی پیشرفتهتر بشه.
در هر صورت، فعلاً پروژهی «اسکلت رباتیک ضدچیتر» زتا هم یه شوخی حساب میشه و هم یه اثبات قوی برای اینکه ترکیب رباتیک، هوش مصنوعی و مهندسی مکانیک میتونه عکسالعمل انسانی رو از محدودیتهای طبیعی خودش فراتر ببره و یه تحول اساسی ایجاد کنه!
منبع: +











