
همیشه این فیلمهای علمی-تخیلی رو دیدی که یه عالمه درون یا ربات با هم قشنگ همکاری میکنن و یه چیزی رو بلند میکنن؟ خب واقعیتش اینه که دانشمندای دانشگاه TU Delft اومدن و تقریباً همین کار رو تو دنیای واقعی کردن! داستان اینه که یه الگوریتم جدید ساختن که میتونه چندتا درون (همون پهپادهایی که از راه دور کنترل میشن و تو هوا پرواز میکنن) رو جوری هماهنگ کنه که با هم بتونن یه بار سنگین رو از جاهای سخترس، مثل توربینهای بادی وسط دریا، بلند کنن و ببرن سر جاش.
تا حالا توجه کردی هر درون رو که نگاه میکنی، خیلی زورش نمیرسه یه چیز بزرگ رو حمل کنه؟ خود Sihao Sun، یکی از محققها، میگه: «یه دونه درون فقط میتونه یه بار محدود و سبک رو حمل کنه. همین کار باعث میشه برای کارایی مثل بردن مصالح ساختمانی سنگین به یک منطقه دورافتاده یا حمل محصولات کشاورزی از کوهها یا حتی کمکرسانی موقع عملیات نجات، کلی داستان داشته باشیم!»
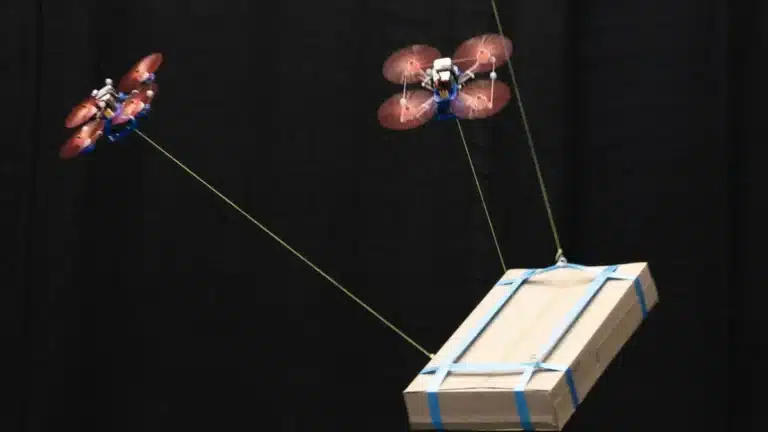
اما راهحلشون خیلی خفنه: چندتا درون رو با کابل به یه بار وصل میکنن و با کمک همین الگوریتم باحال، هر درون جاش رو لحظهای تنظیم میکنه و مثل یه تیم فوتبالی که همه با هم حواسشون به توپ هست، کمک میکنن بار سنگین رو هم بلند کنن هم صاف و آروم ببرنش سرجاش. این موضوع تو محیطهای سخت مثل باد شدید یا هر مانع دیگه خیلی کاربردیه.
یه نکته جالب اینه که چالش اصلی، فقط بلند کردن وزنه نیست، بلکه هماهنگی بین درونهاست. وقتی همشون با کابل به یه بار وصل هستن، اگه یکی یه ذره تکون بخوره یا بار حرکت غیرمنتظرهای کنه، بقیه هم باید بلافاصله واکنش نشون بدن و خودشون رو تنظیم کنن. الگوریتمهای قدیمی اینکار خیلی کند و دست و پاگیر بودن و نمیتونستن این هماهنگی لحظهای رو انجام بدن.
حالا این الگوریتم جدید جوری طراحی شده که سریع، قابل انعطاف و مقاومه. یعنی اگه بار یههو سبک یا سنگین بشه یا باد بیاد، میتونه بدون اینکه نیاز باشه سنسور خاصی روی خود بار بذارن (خیلی مهمه تو دنیای واقعی)، همه چی رو کنترل کنه و موقعیت بار رو ثابت نگه داره.
اگه دوست داری بدونی الگوریتم کنترل یعنی چی، همین یه توضیح کوچیک: الگوریتم کنترل تو رباتیک یعنی مغز متفکر برنامهای که مشخص میکنه روبات (یا اینجا درونها) کی، چطور و با چه نیرو و جهتی چیزی رو حرکت بدن.
مطالعهشون تو نشریه Science Robotics چاپ شده و یه راه حل اساسی برای قویتر و سریعتر کردن این سیستمها معرفی میکنه. خلاصهش اینه که دیگه مثل روشهای قدیمی که همه چیز مرحله به مرحله بررسی میشد کار نمیکنن؛ یه روش جدید «trajectory-based» دادن به معنی مسیرمحور، یعنی همزمان که همه شرایط رو لحظهای بررسی میکنن، مسیری هم که بار باید بره رو تو مغزشون دارن و هرازگاهی اون رو آپدیت میکنن تا به بهترین شکل برسن.
یه مثال بزنم: اونا آزمایشهاشون رو تو یه محیط آزمایشگاهی انجام دادن (فعلا با دوربینهای مخصوص برای دنبال کردن حرکت درونها)، تا چهار تا درون با هم، با مانعچینی، باد مصنوعی (فن گذاشتن!) و حتی حرکت بار مثل توپ بسکتبال، تست گرفتن. نتیجه؟ این سیستم حداقل تا هشت برابر سرعت و شتاب بیشتری نسبت به روشهای قبلی برای مسیرهای پیچیده و سریع داشت!
البته فعلا این سیستم تو فضای داخل آزمایشگاه کار میکنه و برای بیرون آماده نیست (چون وابسته به دوربینهای حرکتیه). اما تیم محققها گفتن حسابی دارن روش کار میکنن تا بهزودی این الگوریتم رو تو دنیا واقعی و رو محیطهای باز اجرا کنن. کاربردهای آیندش هم خیلی جذابه: کمک در عملیات جستوجو و نجات، کشاورزی و حتی ساختوساز تو مناطق دور یا سختدسترس.
نکته آخر اینکه این سیستم چون خودکار و اتوماتیکه، فقط بهش مقصد رو میدی، خودش همه چی رو مدیریت میکنه، با مانعها و باد و تکونهای مسیر کنار میاد و بار رو سالم میرسونه. خلاصه اگه یه روز دیدی چندتا درون حرفهای دارن با هم یه بار عجیبغریب رو میبرن سر جاش، بدون پشت قضیه یه الگوریتم باحال و نابغه هست!
منبع: +


















